Section 11.4 : Cross Product
In this final section of this chapter we will look at the cross product of two vectors. We should note that the cross product requires both of the vectors to be three dimensional vectors.
Also, before getting into how to compute these we should point out a major difference between dot products and cross products. The result of a dot product is a number and the result of a cross product is a vector! Be careful not to confuse the two.
So, let’s start with the two vectors \(\vec a = \left\langle {{a_1},{a_2},{a_3}} \right\rangle \) and \(\vec b = \left\langle {{b_1},{b_2},{b_3}} \right\rangle \) then the cross product is given by the formula,
This is not an easy formula to remember. There are two ways to derive this formula. Both of them use the fact that the cross product is really the determinant of a 3x3 matrix. If you don’t know what that is don’t worry about it. You don’t need to know anything about matrices or determinants to use either of the methods. The notation for the determinant is as follows,
The first row is the standard basis vectors and must appear in the order given here. The second row is the components of \(\vec a\) and the third row is the components of \(\vec b\). Now, let’s take a look at the different methods for getting the formula.
The first method uses the Method of Cofactors. If you don’t know the method of cofactors that is fine, the result is all that we need. Here is the formula.
where,
\[\left| {\begin{array}{*{20}{c}}a&b\\c&d\end{array}} \right| = ad - bc\]This formula is not as difficult to remember as it might at first appear to be. First, the terms alternate in sign and notice that the 2x2 is missing the column below the standard basis vector that multiplies it as well as the row of standard basis vectors.
The second method is slightly easier; however, many textbooks don’t cover this method as it will only work on 3x3 determinants. This method says to take the determinant as listed above and then copy the first two columns onto the end as shown below.
\[\vec a \times \vec b = \left| {\begin{array}{*{20}{c}}{\vec i}&{\vec j}&{\vec k}\\{{a_1}}&{{a_2}}&{{a_3}}\\{{b_1}}&{{b_2}}&{{b_3}}\end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}}{\vec i}&{\vec j}\\{{a_1}}&{{a_2}}\\{{b_1}}&{{b_2}}\end{array}\]We now have three diagonals that move from left to right and three diagonals that move from right to left. We multiply along each diagonal and add those that move from left to right and subtract those that move from right to left.
This is best seen in an example. We’ll also use this example to illustrate a fact about cross products.
- \(\vec a \times \vec b\)
- \(\vec b \times \vec a\)
Here is the computation for this one.
\[\begin{align*}\vec a \times \vec b & = \left| {\begin{array}{*{20}{c}}{\vec i}&{\vec j}&{\vec k}\\2&1&{ - 1}\\{ - 3}&4&1\end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}}{\vec i}&{\vec j}\\2&1\\{ - 3}&4\end{array}\\ & = \vec i\left( 1 \right)\left( 1 \right) + \vec j\left( { - 1} \right)\left( { - 3} \right) + \vec k\left( 2 \right)\left( 4 \right) - \vec j\left( 2 \right)\left( 1 \right) - \vec i\left( { - 1} \right)\left( 4 \right) - \vec k\left( 1 \right)\left( { - 3} \right)\\ & = 5\vec i + \vec j + 11\vec k\end{align*}\]b \(\vec b \times \vec a\) Show Solution
And here is the computation for this one.
\[\begin{align*}\vec b \times \vec a & = \left| {\begin{array}{*{20}{c}}{\vec i}&{\vec j}&{\vec k}\\{ - 3}&4&1\\2&1&{ - 1}\end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}}{\vec i}&{\vec j}\\{ - 3}&4\\2&1\end{array}\\ & = \vec i\left( 4 \right)\left( { - 1} \right) + \vec j\left( 1 \right)\left( 2 \right) + \vec k\left( { - 3} \right)\left( 1 \right) - \vec j\left( { - 3} \right)\left( { - 1} \right) - \vec i\left( 1 \right)\left( 1 \right) - \vec k\left( 4 \right)\left( 2 \right)\\ & = - 5\vec i - \vec j - 11\vec k\end{align*}\]Notice that switching the order of the vectors in the cross product simply changed all the signs in the result. Note as well that this means that the two cross products will point in exactly opposite directions since they only differ by a sign. We’ll formalize up this fact shortly when we list several facts.
There is also a geometric interpretation of the cross product. First we will let \(\theta\) be the angle between the two vectors \(\vec a\) and \(\vec b\)and assume that \(0 \le \theta \le \pi \), then we have the following fact,
\[\begin{equation}\left\| {\vec a \times \vec b} \right\| = \left\| {\vec a} \right\|\,\,\left\| {\vec b} \right\|\,\sin \theta \label{eq:eq1} \end{equation}\]and the following figure.

There should be a natural question at this point. How did we know that the cross product pointed in the direction that we’ve given it here?
First, as this figure implies, the cross product is orthogonal to both of the original vectors. This will always be the case with one exception that we’ll get to in a second.
Second, we knew that it pointed in the upward direction (in this case) by the “right hand rule”. This says that if we take our right hand, start at \(\vec a\) and rotate our fingers towards \(\vec b\)our thumb will point in the direction of the cross product. Therefore, if we’d sketched in \(\vec b \times \vec a\) above we would have gotten a vector in the downward direction.
The one way that we know to get an orthogonal vector is to take a cross product. So, if we could find two vectors that we knew were in the plane and took the cross product of these two vectors we know that the cross product would be orthogonal to both the vectors. However, since both the vectors are in the plane the cross product would then also be orthogonal to the plane.
So, we need two vectors that are in the plane. This is where the points come into the problem. Since all three points lie in the plane any vector between them must also be in the plane. There are many ways to get two vectors between these points. We will use the following two,
\[\begin{align*}\overrightarrow {PQ} & = \left\langle {1 - 1,1 - 0,1 - 0} \right\rangle = \left\langle {0,1,1} \right\rangle \\ \overrightarrow {PR} & = \left\langle {2 - 1, - 1 - 0,3 - 0} \right\rangle = \left\langle {1, - 1,3} \right\rangle \end{align*}\]The cross product of these two vectors will be orthogonal to the plane. So, let’s find the cross product.
\[\begin{align*}\overrightarrow {PQ} \times \overrightarrow {PR} & = \left| {\begin{array}{*{20}{c}}{\vec i}&{\vec j}&{\vec k}\\0&1&1\\1&{ - 1}&3\end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}}{\vec i}&{\vec j}\\0&1\\1&{ - 1}\end{array}\\ & = 4\vec i + \vec j - \vec k\end{align*}\]So, the vector \(4\vec i + \vec j - \vec k\) will be orthogonal to the plane containing the three points.
Now, let’s address the one time where the cross product will not be orthogonal to the original vectors. If the two vectors, \(\vec a\) and \(\vec b\), are parallel then the angle between them is either 0 or 180 degrees. From \(\eqref{eq:eq1}\) this implies that,
\[\left\| {\vec a \times \vec b} \right\| = 0\]From a fact about the magnitude we saw in the first section we know that this implies
\[\vec a \times \vec b = \vec 0\]In other words, it won’t be orthogonal to the original vectors since we have the zero vector. This does give us another test for parallel vectors however.
Fact
If \(\vec a \times \vec b = \vec 0\) then \(\vec a\) and \(\vec b\) will be parallel vectors.
Let’s also formalize up the fact about the cross product being orthogonal to the original vectors.
Fact
Provided \(\vec a \times \vec b \ne \vec 0\) then \(\vec a \times \vec b\) is orthogonal to both \(\vec a\) and \(\vec b\).
Here are some nice properties about the cross product.
Properties
If \(\vec u\), \(\vec v\) and \(\vec w\) are vectors and \(c\) is a number then,
\[\begin{align*} & \vec u \times \vec v = - \vec v \times \vec u & \hspace{0.75in} & \left( {c\vec u} \right) \times \vec v = \vec u \times \left( {c\vec v} \right) = c\left( {\vec u \times \vec v} \right)\\ &\vec u \times \left( {\vec v + \vec w} \right) = \vec u \times \vec v + \vec u \times \vec w & \hspace{0.75in} & \vec u\centerdot \left( {\vec v \times \vec w} \right) = \left( {\vec u \times \vec v} \right)\centerdot \vec w\\ & \vec u\centerdot \left( {\vec v \times \vec w} \right) = \left| {\begin{array}{*{20}{c}}{{u_1}}&{{u_2}}&{{u_3}}\\{{v_1}}&{{v_2}}&{{v_3}}\\{{w_1}}&{{w_2}}&{{w_3}}\end{array}} \right| & & \end{align*}\]The determinant in the last fact is computed in the same way that the cross product is computed. We will see an example of this computation shortly.
There are a couple of geometric applications to the cross product as well. Suppose we have three vectors \(\vec a\), \(\vec b\) and \(\vec c\) and we form the three dimensional figure shown below.
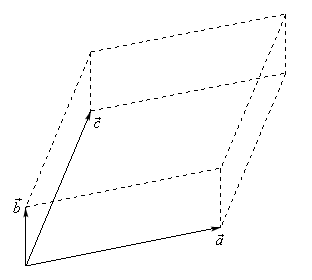
The area of the parallelogram (two dimensional front of this object) is given by,
\[{\rm{Area}} = \left\| {\vec a \times \vec b} \right\|\]and the volume of the parallelepiped (the whole three dimensional object) is given by,
\[{\rm{Volume}} = \left| {\vec a\centerdot \left( {\vec b \times \vec c} \right)} \right|\]Note that the absolute value bars are required since the quantity could be negative and volume isn’t negative.
We can use this volume fact to determine if three vectors lie in the same plane or not. If three vectors lie in the same plane then the volume of the parallelepiped will be zero.
So, as we noted prior to this example all we need to do is compute the volume of the parallelepiped formed by these three vectors. If the volume is zero they lie in the same plane and if the volume isn’t zero they don’t lie in the same plane.
\[\begin{align*}\vec a\centerdot \left( {\vec b \times \vec c} \right) & = \left| {\begin{array}{*{20}{c}}1&4&{ - 7}\\2&{ - 1}&4\\0&{ - 9}&{18}\end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}}1&4\\2&{ - 1}\\0&{ - 9}\end{array}\\ & = \left( 1 \right)\left( { - 1} \right)\left( {18} \right) + \left( 4 \right)\left( 4 \right)\left( 0 \right) + \left( { - 7} \right)\left( 2 \right)\left( { - 9} \right) - \\ & \hspace{0.75in}\left( 4 \right)\left( 2 \right)\left( {18} \right) - \left( 1 \right)\left( 4 \right)\left( { - 9} \right) - \left( { - 7} \right)\left( { - 1} \right)\left( 0 \right)\\ & = - 18 + 126 - 144 + 36\\ & = 0\end{align*}\]So, the volume is zero and so they lie in the same plane.