Section 17.4 : Surface Integrals of Vector Fields
Just as we did with line integrals we now need to move on to surface integrals of vector fields. Recall that in line integrals the orientation of the curve we were integrating along could change the answer. The same thing will hold true with surface integrals. So, before we really get into doing surface integrals of vector fields we first need to introduce the idea of an oriented surface.
Let’s start off with a surface that has two sides (while this may seem strange, recall that the Mobius Strip is a surface that only has one side!) that has a tangent plane at every point (except possibly along the boundary). Making this assumption means that every point will have two unit normal vectors, \({\vec n_1}\) and \({\vec n_2} = - {\vec n_1}\). This means that every surface will have two sets of normal vectors. The set that we choose will give the surface an orientation.
There is one convention that we will make in regard to certain kinds of oriented surfaces. First, we need to define a closed surface. A surface \(S\) is closed if it is the boundary of some solid region \(E\). A good example of a closed surface is the surface of a sphere. We say that the closed surface \(S\) has a positive orientation if we choose the set of unit normal vectors that point outward from the region \(E\) while the negative orientation will be the set of unit normal vectors that point in towards the region \(E\).
Note that this convention is only used for closed surfaces.
In order to work with surface integrals of vector fields we will need to be able to write down a formula for the unit normal vector corresponding to the orientation that we’ve chosen to work with. We have two ways of doing this depending on how the surface has been given to us.
First, let’s suppose that the function is given by \(z = g\left( {x,y} \right)\). In this case we first define a new function,
\[f\left( {x,y,z} \right) = z - g\left( {x,y} \right)\]In terms of our new function the surface is then given by the equation \(f\left( {x,y,z} \right) = 0\). Now, recall that \(\nabla f\) will be orthogonal (or normal) to the surface given by \(f\left( {x,y,z} \right) = 0\). This means that we have a normal vector to the surface. The only potential problem is that it might not be a unit normal vector. That isn’t a problem since we also know that we can turn any vector into a unit vector by dividing the vector by its length. In our case this is,
\[\vec n = \frac{{\nabla f}}{{\left\| {\nabla f} \right\|}}\]In this case it will be convenient to actually compute the gradient vector and plug this into the formula for the normal vector. Doing this gives,
\[\vec n = \frac{{\nabla f}}{{\left\| {\nabla f} \right\|}} = \frac{{ - {g_x}\,\vec i - {g_y}\,\vec j + \vec k}}{{\sqrt {{{\left( {{g_x}} \right)}^2} + {{\left( {{g_y}} \right)}^2} + 1} }}\]Now, from a notational standpoint this might not have been so convenient, but it does allow us to make a couple of additional comments.
First, notice that the component of the normal vector in the \(z\)-direction (identified by the \(\vec k\) in the normal vector) is always positive and so this normal vector will generally point upwards. It may not point directly up, but it will have an upwards component to it.
This will be important when we are working with a closed surface and we want the positive orientation. If we know that we can then look at the normal vector and determine if the “positive” orientation should point upwards or downwards. Remember that the “positive” orientation must point out of the region and this may mean downwards in places. Of course, if it turns out that we need the downward orientation we can always take the negative of this unit vector and we’ll get the one that we need. Again, remember that we always have that option when choosing the unit normal vector.
Before we move onto the second method of giving the surface we should point out that we only did this for surfaces in the form \(z = g\left( {x,y} \right)\). We could just as easily done the above work for surfaces in the form \(y = g\left( {x,z} \right)\) (so \(f\left( {x,y,z} \right) = y - g\left( {x,z} \right)\)) or for surfaces in the form \(x = g\left( {y,z} \right)\) (so \(f\left( {x,y,z} \right) = x - g\left( {y,z} \right)\)).
Now, we need to discuss how to find the unit normal vector if the surface is given parametrically as,
\[\vec r\left( {u,v} \right) = x\left( {u,v} \right)\vec i + y\left( {u,v} \right)\vec j + z\left( {u,v} \right)\vec k\]In this case recall that the vector \({\vec r_u} \times {\vec r_v}\) will be normal to the tangent plane at a particular point. But if the vector is normal to the tangent plane at a point then it will also be normal to the surface at that point. So, this is a normal vector. In order to guarantee that it is a unit normal vector we will also need to divide it by its magnitude.
So, in the case of parametric surfaces one of the unit normal vectors will be,
\[\vec n = \frac{{{{\vec r}_u} \times {{\vec r}_v}}}{{\left\| {{{\vec r}_u} \times {{\vec r}_v}} \right\|}}\]As with the first case we will need to look at this once it’s computed and determine if it points in the correct direction or not. If it doesn’t then we can always take the negative of this vector and that will point in the correct direction.
Finally, remember that we can always parameterize any surface given by \(z = g\left( {x,y} \right)\) (or \(y = g\left( {x,z} \right)\) or \(x = g\left( {y,z} \right)\)) easily enough and so if we want to we can always use the parameterization formula to find the unit normal vector.
Okay, now that we’ve looked at oriented surfaces and their associated unit normal vectors we can actually give a formula for evaluating surface integrals of vector fields.
Given a vector field \(\vec F\) with unit normal vector \(\vec n\) then the surface integral of \(\vec F\) over the surface \(S\) is given by,
where the right hand integral is a standard surface integral. This is sometimes called the flux of \(\vec F\) across \(S\).
Before we work any examples let’s notice that we can substitute in for the unit normal vector to get a somewhat easier formula to use. We will need to be careful with each of the following formulas however as each will assume a certain orientation and we may have to change the normal vector to match the given orientation.
Let’s first start by assuming that the surface is given by \(z = g\left( {x,y} \right)\). In this case let’s also assume that the vector field is given by \(\vec F = P\,\vec i + Q\,\vec j + R\,\vec k\) and that the orientation that we are after is the “upwards” orientation. Under all of these assumptions the surface integral of \(\vec F\) over \(S\) is,
\[\begin{align*}\iint\limits_{S}{{\vec F\centerdot d\vec S}} & = \iint\limits_{S}{{\vec F\centerdot \vec n\,dS}}\\ & = \iint\limits_{D}{{\left( {P\,\vec i + Q\,\vec j + R\,\vec k} \right)\centerdot \left( {\frac{{ - {g_x}\,\vec i - {g_y}\,\vec j + \vec k}}{{\sqrt {{{\left( {{g_x}} \right)}^2} + {{\left( {{g_y}} \right)}^2} + 1} }}} \right)}}\sqrt {{{\left( {{g_x}} \right)}^2} + {{\left( {{g_y}} \right)}^2} + 1} \,dA\\ & = \iint\limits_{D}{{\left( {P\,\vec i + Q\,\vec j + R\,\vec k} \right)\centerdot \left( { - {g_x}\,\vec i - {g_y}\,\vec j + \vec k} \right)}}\,dA\\ & = \iint\limits_{D}{{ - P{g_x} - Q{g_y} + R}}\,dA\end{align*}\]Now, remember that this assumed the “upward” orientation. If we’d needed the “downward” orientation, then we would need to change the signs on the normal vector. This would in turn change the signs on the integrand as well. So, we really need to be careful here when using this formula. In general, it is best to rederive this formula as you need it.
When we’ve been given a surface that is not in parametric form there are in fact 6 possible integrals here. Two for each form of the surface \(z = g\left( {x,y} \right)\), \(y = g\left( {x,z} \right)\) and \(x = g\left( {y,z} \right)\). Given each form of the surface there will be two possible unit normal vectors and we’ll need to choose the correct one to match the given orientation of the surface. However, the derivation of each formula is similar to that given here and so shouldn’t be too bad to do as you need to.
Notice as well that because we are using the unit normal vector the messy square root will always drop out. This means that when we do need to derive the formula we won’t really need to put this in. All we’ll need to work with is the numerator of the unit vector. We will see at least one more of these derived in the examples below. It should also be noted that the square root is nothing more than,
\[\sqrt {{{\left( {{g_x}} \right)}^2} + {{\left( {{g_y}} \right)}^2} + 1} = \left\| {\nabla f} \right\|\]so in the following work we will probably just use this notation in place of the square root when we can to make things a little simpler.
Let’s now take a quick look at the formula for the surface integral when the surface is given parametrically by \(\vec r\left( {u,v} \right)\). In this case the surface integral is,
\[\begin{align*}\iint\limits_{S}{{\vec F\centerdot d\vec S}} & = \iint\limits_{S}{{\vec F\centerdot \vec n\,dS}}\\ & = \iint\limits_{D}{{\vec F\centerdot \left( {\frac{{{{\vec r}_u} \times {{\vec r}_v}}}{{\left\| {{{\vec r}_u} \times {{\vec r}_v}} \right\|}}} \right)\left\| {{{\vec r}_u} \times {{\vec r}_v}} \right\|\,dA}}\\ & = \iint\limits_{D}{{\vec F\centerdot \left( {{{\vec r}_u} \times {{\vec r}_v}} \right)\,dA}}\end{align*}\]Again, note that we may have to change the sign on \({\vec r_u} \times {\vec r_v}\) to match the orientation of the surface and so there is once again really two formulas here. Also note that again the magnitude cancels in this case and so we won’t need to worry that in these problems either.
Note as well that there are even times when we will use the definition, \(\iint\limits_{S}{{\vec F\centerdot d\vec S}} = \iint\limits_{S}{{\vec F\centerdot \vec n\,dS}}\), directly. We will see an example of this below.
Let’s now work a couple of examples.
Okay, first let’s notice that the disk is really nothing more than the cap on the paraboloid. This means that we have a closed surface. This is important because we’ve been told that the surface has a positive orientation and by convention this means that all the unit normal vectors will need to point outwards from the region enclosed by \(S\).
Let’s first get a sketch of \(S\) so we can get a feel for what is going on and in which direction we will need to unit normal vectors to point.
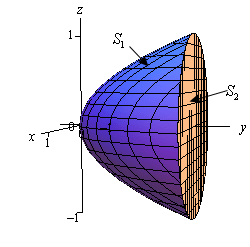
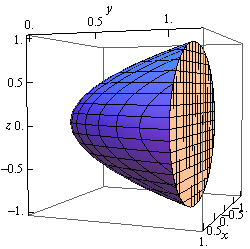
As noted in the sketch we will denote the paraboloid by \({S_1}\) and the disk by \({S_2}\). Also note that in order for unit normal vectors on the paraboloid to point away from the region they will all need to point generally in the negative \(y\) direction. On the other hand, unit normal vectors on the disk will need to point in the positive \(y\) direction in order to point away from the region.
Since \(S\) is composed of the two surfaces we’ll need to do the surface integral on each and then add the results to get the overall surface integral. Let’s start with the paraboloid. In this case we have the surface in the form \(y = g\left( {x,z} \right)\) so we will need to derive the correct formula since the one given initially wasn’t for this kind of function. This is easy enough to do however. First define,
\[f\left( {x,y,z} \right) = y - g\left( {x,z} \right) = y - {x^2} - {z^2}\]We will next need the gradient vector of this function.
\[\nabla f = \left\langle { - 2x,1, - 2z} \right\rangle \]Now, the \(y\) component of the gradient is positive and so this vector will generally point in the positive \(y\) direction. However, as noted above we need the normal vector point in the negative \(y\) direction to make sure that it will be pointing away from the enclosed region. This means that we will need to use
\[\vec n = \frac{{ - \nabla f}}{{\left\| { - \nabla f} \right\|}} = \frac{{\left\langle {2x, - 1,2z} \right\rangle }}{{\left\| {\nabla f} \right\|}}\]Let’s note a couple of things here before we proceed. We don’t really need to divide this by the magnitude of the gradient since this will just cancel out once we actually do the integral. So, because of this we didn’t bother computing it. Also, the dropping of the minus sign is not a typo. When we compute the magnitude we are going to square each of the components and so the minus sign will drop out.
\({S_1}\) : The Paraboloid
Okay, here is the surface integral in this case.
\[\begin{align*}\iint\limits_{{{S_1}}}{{\vec F\centerdot d\vec S}} & = \iint\limits_{D}{{\left( {y\,\vec j - z\,\vec k} \right)\centerdot \left( {\frac{{\left\langle {2x, - 1,2z} \right\rangle }}{{\left\| {\nabla f} \right\|}}} \right)\,\left\| {\nabla f} \right\|\,dA}}\\ & = \iint\limits_{D}{{ - y - 2{z^2}\,dA}}\\ & = \iint\limits_{D}{{ - \left( {{x^2} + {z^2}} \right) - 2{z^2}\,dA}}\\ & = - \iint\limits_{D}{{{x^2} + 3{z^2}\,dA}}\end{align*}\]Don’t forget that we need to plug in the equation of the surface for \(y\) before we actually compute the integral. In this case \(D\) is the disk of radius 1 in the \(xz\)-plane and so it makes sense to use polar coordinates to complete this integral. Here are polar coordinates for this region.
\[\begin{array}{c}x = r\cos \theta \hspace{0.5in}z = r\sin \theta \\ 0 \le \theta \le 2\pi \hspace{0.5in}0 \le r \le 1\end{array}\]Note that we kept the \(x\) conversion formula the same as the one we are used to using for \(x\) and let \(z\) be the formula that used the sine. We could have done it any order, however in this way we are at least working with one of them as we are used to working with.
Here is the evaluation of this integral.
\[\begin{align*}\iint\limits_{{{S_1}}}{{\vec F\centerdot d\vec S}} & = - \iint\limits_{D}{{{x^2} + 3{z^2}\,dA}}\\ & = - \int_{{\,0}}^{{\,2\pi }}{{\int_{{\,0}}^{{\,1}}{{\left( {{r^2}{{\cos }^2}\theta + 3{r^2}{{\sin }^2}\theta } \right)r\,dr}}\,d\theta }}\\ & = - \int_{{\,0}}^{{\,2\pi }}{{\int_{{\,0}}^{{\,1}}{{\left( {{{\cos }^2}\theta + 3{{\sin }^2}\theta } \right){r^3}\,dr}}\,d\theta }}\\ & = - \int_{{\,0}}^{{\,2\pi }}{{\left( {\frac{1}{2}\left( {1 + \cos \left( {2\theta } \right)} \right) + \frac{3}{2}\left( {1 - \cos \left( {2\theta } \right)} \right)} \right)\left. {\left( {\frac{1}{4}{r^4}} \right)} \right|_0^1\,d\theta }}\\ & = - \frac{1}{8}\int_{{\,0}}^{{\,2\pi }}{{4 - 2\cos \left( {2\theta } \right)\,d\theta }}\\ & = - \left. {\frac{1}{8}\left( {4\theta - \sin \left( {2\theta } \right)} \right)} \right|_0^{2\pi }\\ & = - \pi \end{align*}\]\({S_2}\) : The Cap of the Paraboloid
We can now do the surface integral on the disk (cap on the paraboloid). This one is actually fairly easy to do and in fact we can use the definition of the surface integral directly. First let’s notice that the disk is really just the portion of the plane \(y = 1\) that is in front of the disk of radius 1 in the \(xz\)-plane.
Now we want the unit normal vector to point away from the enclosed region and since it must also be orthogonal to the plane \(y = 1\) then it must point in a direction that is parallel to the \(y\)-axis, but we already have a unit vector that does this. Namely,
\[\vec n = \vec j\]the standard unit basis vector. It also points in the correct direction for us to use. Because we have the vector field and the normal vector we can plug directly into the definition of the surface integral to get,
\[\iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} = \iint\limits_{{{S_2}}}{{\left( {y\,\vec j - z\,\vec k} \right)\centerdot \left( {\vec j} \right)\,dS}}\, = \iint\limits_{{{S_2}}}{{y\,dS}}\]At this point we need to plug in for \(y\) (since \({S_2}\)is a portion of the plane \(y = 1\) we do know what it is) and we’ll also need the square root this time when we convert the surface integral over to a double integral. In this case since we are using the definition directly we won’t get the canceling of the square root that we saw with the first portion. To get the square root well need to acknowledge that
\[y = 1 = g\left( {x,z} \right)\]and so the square root is,
\[\sqrt {{{\left( {{g_x}} \right)}^2} + 1 + {{\left( {{g_z}} \right)}^2}} \]The surface integral is then,
\[\begin{align*}\iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} & = \iint\limits_{{{S_2}}}{{y\,dS}}\\ & = \iint\limits_{D}{{1\sqrt {0 + 1 + 0} \,dA}} = \iint\limits_{D}{{dA}}\end{align*}\]At this point we can acknowledge that \(D\) is a disk of radius 1 and this double integral is nothing more than the double integral that will give the area of the region \(D\) so there is no reason to compute the integral. Here is the value of the surface integral.
\[\iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} = \pi \]Finally, to finish this off we just need to add the two parts up. Here is the surface integral that we were actually asked to compute.
\[\iint\limits_{S}{{\vec F\centerdot d\vec S}} = \iint\limits_{{{S_1}}}{{\vec F\centerdot d\vec S}} + \iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} = - \pi + \pi = 0\]So, as with the previous problem we have a closed surface and since we are also told that the surface has a positive orientation all the unit normal vectors must point away from the enclosed region. To help us visualize this here is a sketch of the surface.
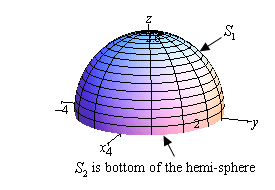
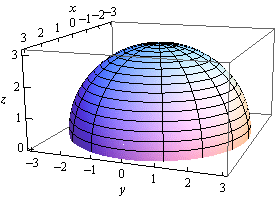
We will call \({S_1}\) the hemisphere and \({S_2}\) will be the bottom of the hemisphere (which isn’t shown on the sketch). Now, in order for the unit normal vectors on the sphere to point away from enclosed region they will all need to have a positive \(z\) component. Remember that the vector must be normal to the surface and if there is a positive \(z\) component and the vector is normal it will have to be pointing away from the enclosed region.
On the other hand, the unit normal on the bottom of the disk must point in the negative \(z\) direction in order to point away from the enclosed region.
\({S_1}\) : The Sphere
Let’s do the surface integral on \({S_1}\) first. In this case since the surface is a sphere we will need to use the parametric representation of the surface. This is,
\[\vec r\left( {\theta ,\varphi } \right) = 3\sin \varphi \cos \theta \,\vec i + 3\sin \varphi \sin \theta \,\vec j + 3\cos \varphi \,\vec k\]Since we are working on the hemisphere here are the limits on the parameters that we’ll need to use.
\[0 \le \theta \le 2\pi \hspace{0.25in}\hspace{0.25in}0 \le \varphi \le \frac{\pi }{2}\]Next, we need to determine \({\vec r_\theta } \times {\vec r_\varphi }\). Here are the two individual vectors and the cross product.
\[\begin{align*}{{\vec r}_\theta }\left( {\theta ,\varphi } \right) & = - 3\sin \varphi \sin \theta \,\vec i + 3\sin \varphi \cos \theta \,\vec j\\ {{\vec r}_\varphi }\left( {\theta ,\varphi } \right) & = 3\cos \varphi \cos \theta \,\vec i + 3\cos \varphi \sin \theta \,\vec j - 3\sin \varphi \,\vec k\end{align*}\] \[\begin{align*}{{\vec r}_\theta } \times {{\vec r}_\varphi } & = \left| {\begin{array}{*{20}{c}}{\vec i}&{\vec j}&{\vec k}\\{ - 3\sin \varphi \sin \theta }&{3\sin \varphi \cos \theta }&0\\{3\cos \varphi \cos \theta }&{3\cos \varphi \sin \theta }&{ - 3\sin \varphi }\end{array}} \right|\\ & = - 9{\sin ^2}\varphi \cos \theta \,\vec i - 9\sin \varphi \cos \varphi {\sin ^2}\theta \,\vec k - 9{\sin ^2}\varphi \sin \theta \,\vec j - 9\sin \varphi \cos \varphi {\cos ^2}\theta \,\vec k\\ & = - 9{\sin ^2}\varphi \cos \theta \,\vec i - 9{\sin ^2}\varphi \sin \theta \,\vec j - 9\sin \varphi \cos \varphi \left( {{{\sin }^2}\theta \, + {{\cos }^2}\theta } \right)\vec k\\ & = - 9{\sin ^2}\varphi \cos \theta \,\vec i - 9{\sin ^2}\varphi \sin \theta \,\vec j - 9\sin \varphi \cos \varphi \,\vec k\end{align*}\]Note that we won’t need the magnitude of the cross product since that will cancel out once we start doing the integral.
Notice that for the range of \(\varphi \) that we’ve got both sine and cosine are positive and so this vector will have a negative \(z\) component and as we noted above in order for this to point away from the enclosed area we will need the \(z\) component to be positive. Therefore, we will need to use the following vector for the unit normal vector.
\[\vec n = - \frac{{{{\vec r}_\theta } \times {{\vec r}_\varphi }}}{{\left\| {{{\vec r}_\theta } \times {{\vec r}_\varphi }} \right\|}} = \frac{{9{{\sin }^2}\varphi \cos \theta \,\vec i + 9{{\sin }^2}\varphi \sin \theta \,\vec j + 9\sin \varphi \cos \varphi \,\vec k}}{{\left\| {{{\vec r}_\theta } \times {{\vec r}_\varphi }} \right\|}}\]Again, we will drop the magnitude once we get to actually doing the integral since it will just cancel in the integral.
Okay, next we’ll need
\[\vec F\left( {\vec r\left( {\theta ,\varphi } \right)} \right) = 3\sin \varphi \cos \theta \,\vec i + 3\sin \varphi \sin \theta \,\vec j + 81{\cos ^4}\varphi \,\vec k\]Remember that in this evaluation we are just plugging in the \(x\) component of \(\vec r\left( {\theta ,\varphi } \right)\) into the vector field etc.
We also may as well get the dot product out of the way that we know we are going to need.
\[\begin{align*}\vec F\left( {\vec r\left( {\theta ,\varphi } \right)} \right)\centerdot \left(- {{{\vec r}_\theta } \times {{\vec r}_\varphi }} \right) & = 27{\sin ^3}\varphi {\cos ^2}\theta + 27{\sin ^3}\varphi {\sin ^2}\theta + 729\sin \varphi {\cos ^5}\varphi \\ & = 27{\sin ^3}\varphi + 729\sin \varphi {\cos ^5}\varphi \end{align*}\]Now we can do the integral.
\[\begin{align*}\iint\limits_{{{S_{\,1}}}}{{\vec F\centerdot d\vec S}} & = \iint\limits_{D}{{\vec F\centerdot \left( {\frac{{{{\vec r}_\theta} \times {{\vec r}_\varphi}}}{{\left\| {{{\vec r}_\theta } \times {{\vec r}_\varphi }} \right\|}}} \right)\,\left\| {{{\vec r}_\theta } \times {{\vec r}_\varphi }} \right\|\,\,dA}}\\ & = \int_{{\,0}}^{{\,2\pi }}{{\int_{{\,0}}^{{\frac{\pi }{2}}}{{27{{\sin }^3}\varphi + 729\sin \varphi {{\cos }^5}\varphi \,d\varphi }}\,d\theta }}\\ & = \int_{{\,0}}^{{\,2\pi }}{{\int_{{\,0}}^{{\frac{\pi }{2}}}{{27\sin \varphi \left( {1 - {{\cos }^2}\varphi } \right) + 729\sin \varphi {{\cos }^5}\varphi \,d\varphi }}\,d\theta }}\\ & = - \int_{{\,0}}^{{\,2\pi }}{{\left. {\left( {27\left( {\cos \varphi - \frac{1}{3}{{\cos }^3}\varphi } \right) + \frac{{729}}{6}{{\cos }^6}\varphi } \right)} \right|_0^{\frac{\pi }{2}}\,d\theta }}\\ & = \int_{{\,0}}^{{\,2\pi }}{{\frac{{279}}{2}\,d\theta }}\\ & = 279\pi \end{align*}\]\({S_2}\) : The Bottom of the Hemi-Sphere
Now, we need to do the integral over the bottom of the hemisphere. In this case we are looking at the disk \({x^2} + {y^2} \le 9\) that lies in the plane \(z = 0\) and so the equation of this surface is actually \(z = 0\). The disk is really the region \(D\) that tells us how much of the surface we are going to use. This also means that we can use the definition of the surface integral here with
\[\vec n = - \vec k\]We need the negative since it must point away from the enclosed region.
The surface integral in this case is,
\[\begin{align*}\iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} & = \iint\limits_{{{S_2}}}{{\left( {x\,\vec i + y\,\vec j + {z^4}\,\vec k} \right)\centerdot \left( { - \vec k} \right)\,dS}}\,\\ & = \iint\limits_{{{S_2}}}{{ - {z^4}\,dS}}\end{align*}\]Remember, however, that we are in the plane given by \(z = 0\) and so the surface integral becomes,
\[\iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} = \iint\limits_{{{S_2}}}{{ - {z^4}\,dS}} = \iint\limits_{{{S_2}}}{{0\,dS}} = 0\]The last step is to then add the two pieces up. Here is surface integral that we were asked to look at.
\[\iint\limits_{S}{{\vec F\centerdot d\vec S}} = \iint\limits_{{{S_1}}}{{\vec F\centerdot d\vec S}} + \iint\limits_{{{S_2}}}{{\vec F\centerdot d\vec S}} = 279\pi + 0 = 279\pi \]We will leave this section with a quick interpretation of a surface integral over a vector field. If \(\vec v\) is the velocity field of a fluid then the surface integral
\[\iint\limits_{S}{{\vec v\centerdot d\vec S}}\]represents the volume of fluid flowing through \(S\) per time unit (i.e. per second, per minute, or whatever time unit you are using).